The biggest mystery of last year is when Stefan Napp of Napp Motorsports brought his K24-swapped Miata to Pineview Run and we both went faster in my car than his. I had mentioned this in my driving other people’s cars writeup, but didn’t dig into it.
Stefan’s car is the stuff of dreams. Very wet dreams: K24Z3 motor, DIY Bilsteins, BFG Rival 1.5 S tires, Enkei RPF1s. Is there a better specification for a normally aspirated Miata? No. Well OK, a K24A2 is better than a K24Z3, but that’s nitpicking. (I originally wrote that his car was on Xidas, but stand corrected.)

On the other hand, My 1.6 Miata is much more pedestrian. At 2/3 the displacement and no VTEC, the B6ZE is no powerhouse, but as engines go, it’s a sweetheart. I’ve written about this ad nauseam (1, 2, 3): it has all the bolt ons, 264 cams, and a standalone ECU. Most importantly, this was all tuned by the high wizard Rick Gifford.
The shocks are Tein Street Advance, which are a constant source of embarrassment. I mean, the spring rates (392/336 lbs) don’t even appear to be made for a Miata, I know, I know! And finally, the car is on Hankook RS4 tires, which are a step below Rival S and other Super 200s.

Given the different specifications of the two cars, you’d think Stefan’s car would walk all over mine. Comparatively, my car is a dog, but every dog has its day, and on this day, we both went faster in the 1.6 than the 2.4. How is this possible? Let’s look at the data.
Stefan
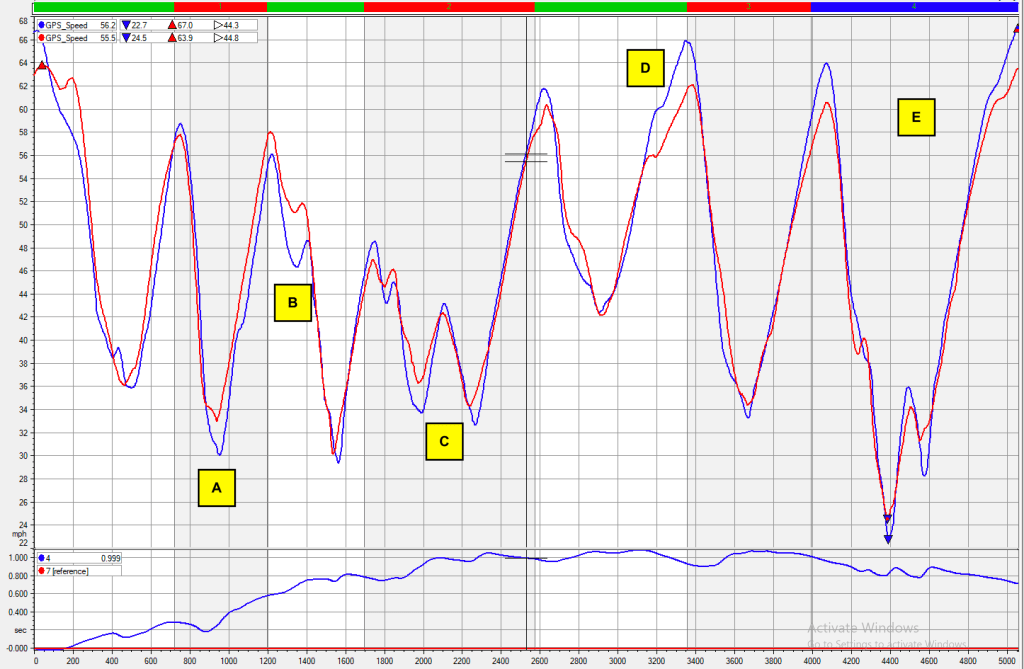
First is Stefan driving my NA6 (red) and his K24 (blue). I’ve marked some points of interest, but the most telling is the time/distance graph that shows he’s 1.3 seconds faster in the slower car.
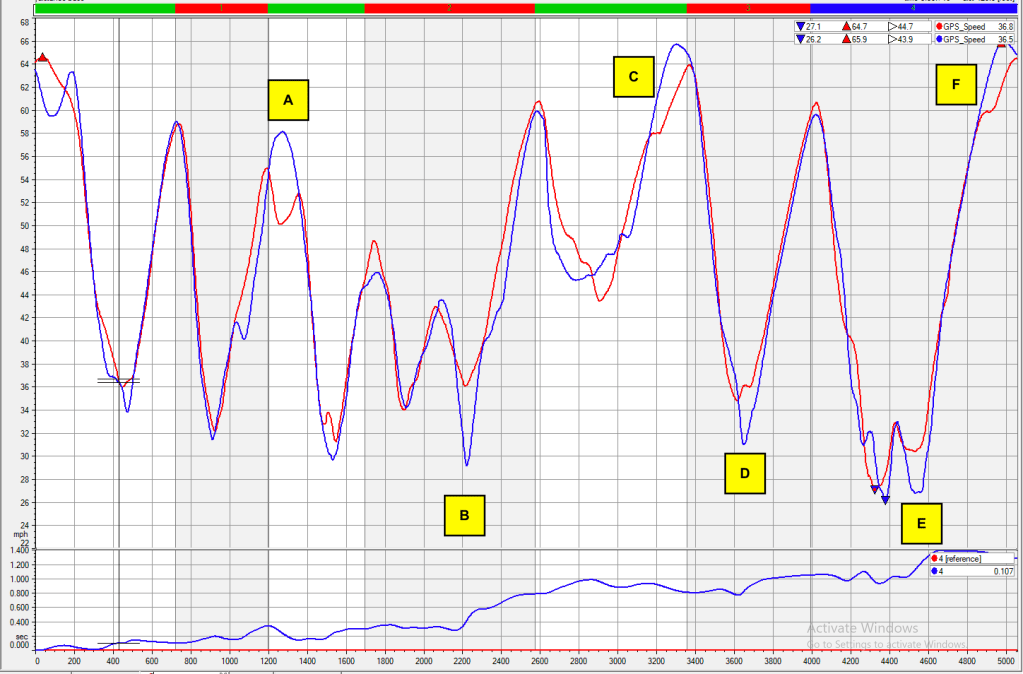
A – Up to this point Stefan is driving both cars pretty equally, but he shuts off going down the hill in my car. It’s a sketchy off-camber spot, and this isn’t his car, so that’s normal.
B – Stefan makes a mistake and brakes too deep at the top of the hill and loses a lot of time on the entry to T11 (Knuckle). Notice the acceleration slope of the blue line. The K24 can really get out of the hole, except that this time the hole was too deep.
C – Stefan takes a long time to shift my NA6 from 2nd to 3rd gear, that’s the dip you see in the red line at the top. Earlier in the corner he took different lines, but they averaged out.
D – Braking too deep loses a little time. What’s interesting here is that I expected to see a much stronger acceleration slope on the blue line. This section is uphill, the NA6 is wheezing, and the K24 should be reeling it in, and isn’t.
E – Stefan loses a chunk of time by slowing too much before the final right hander. Again I’m wondering why the acceleration slope isn’t steeper out of T15, and while the K24 gets to a higher top speed, it’s not that much higher.
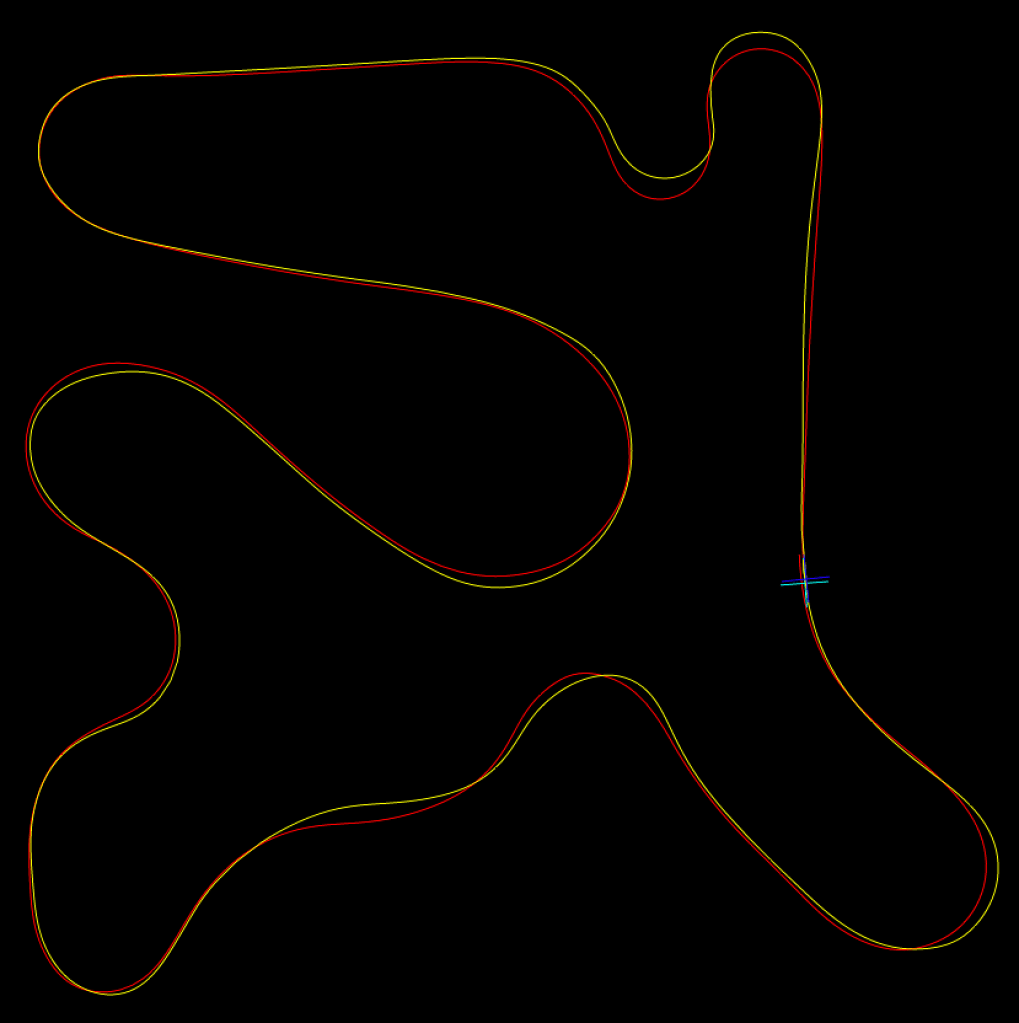
Some of the differences you see on the speed trace are the result of him taking different lines. This is a new track for Stefan, and it’s good to see him experimenting.
I will say that this man can drive! Both Stefan and Dylan were instantly up to speed on an unfamiliar track, and while they would benefit from learning the layout better, they were on the limit of traction from the get-go. Could they go faster? Yes. Could they drive harder? I think not. Check it out in their video.
Theoretical best laps
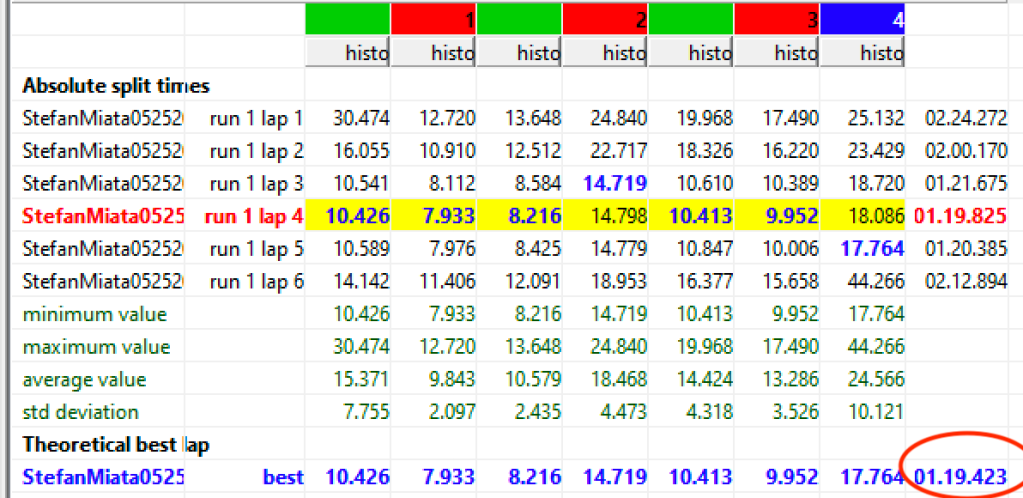
The previous data was from the best lap in each session, but we saw that Stefan made a couple mistakes and was still experimenting with line. So maybe if we stitched together his best sectors, the K24 would be faster? Indeed, it looks like he could have gone .4 seconds faster, and do a 1:19.423.
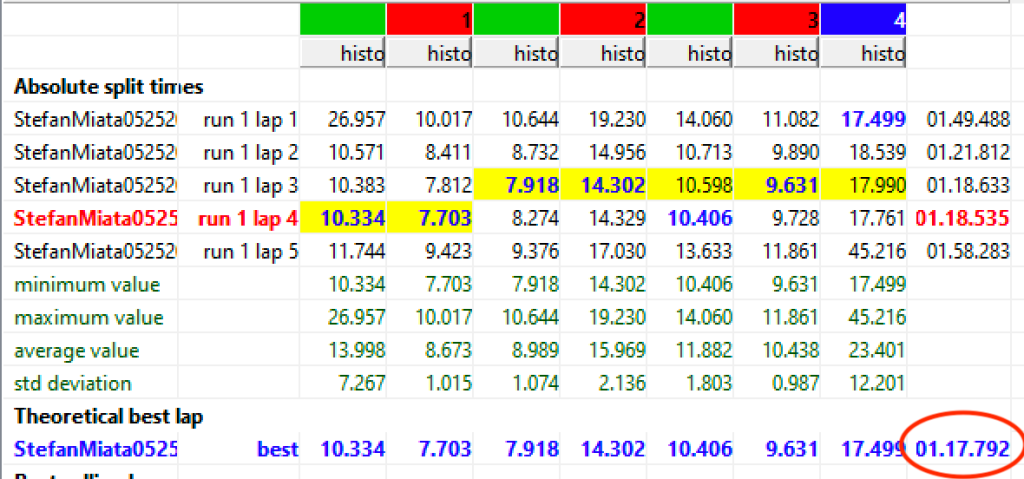
Next let’s see his theoretical best in my NA6, and he could have done a 1:17.792. Now this is flatly astonishing, because you’d expect more variability in the car with more power, and more consistent times from the anemic engine. But instead of .4 seconds, he could have dropped .8 seconds in my car. Now the delta between the cars is 1.63 seconds in favor of the 1.6.
I don’t think we’ve unravelled this mystery at all, if anything, it’s even more convoluted. Let’s see how a driver who knows the track did in both cars.
Mario
I’ll use the same colors, red is my NA6, blue is Stefan’s K24. I know the track better than Stefan (in fact I wrote the book on it, literally), and go about 1.5 seconds faster than Stefan did in his car. The freaky part is I go another .7 second faster in my car.
A – The biggest difference comes from going through the Crick, Turns 3-5. I get the car turned in earlier and this helps my min speed through the corner and down the hill.
B – I roll off going down the hill. This is not my car, on a sketchy part of the track, so I’m slower on the blue line. Recall that Stefan did the exact same thing in my car. We’re kind to each other than way.
C – Another big time delta is in the uphill esses where I can maintain a higher min speed.
D – Here’s where I finally see the K24 dominance, top speed just before braking into the Blind Hairpin. This happens again before braking into T13.
E – Notice the top speed advantage of the K24 on the front straight, this gains some time back at the very end of the lap.
Theoretical best laps
This is the same deal as before, stitching together the best sectors to see what my potential best lap time is in each car. I use a 7-sector map because this is about as granular as I can make it without getting unrealistic times that could never be duplicated in real life.

My best theoretical lap in Stefan’s car would be .615 seconds faster, for a 1:17.280. That’s better, but still doesn’t match the time I did in my car. I’m more comfortable driving my own janky hardware at the limit, and I could have gone .38 seconds faster, for a 1:16.802. See below.
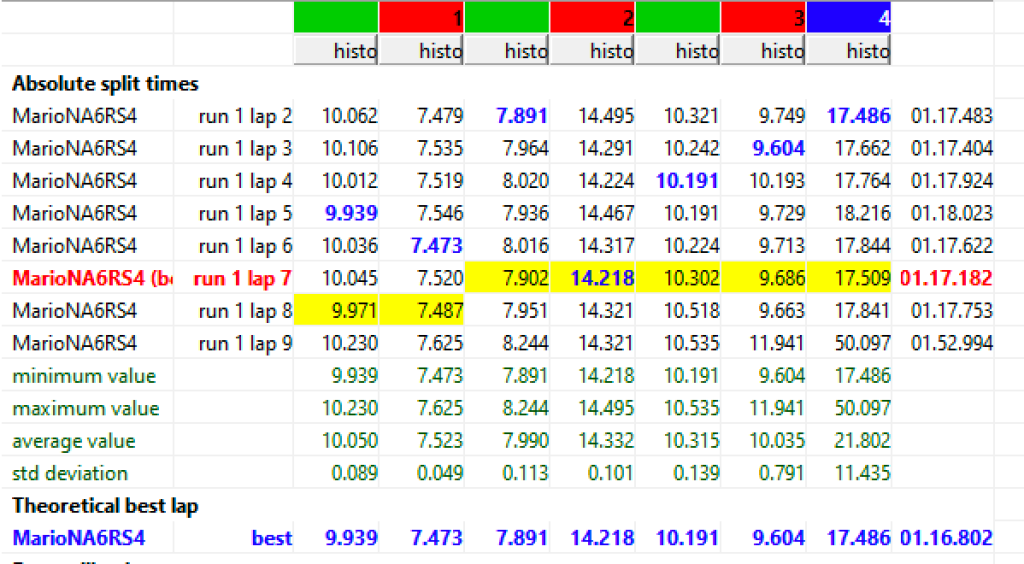
That’s more like the data I expected, with the slower car having less of a delta in theoretical best than the more powerful car. But once again, I did not expect to go faster in the slower car.
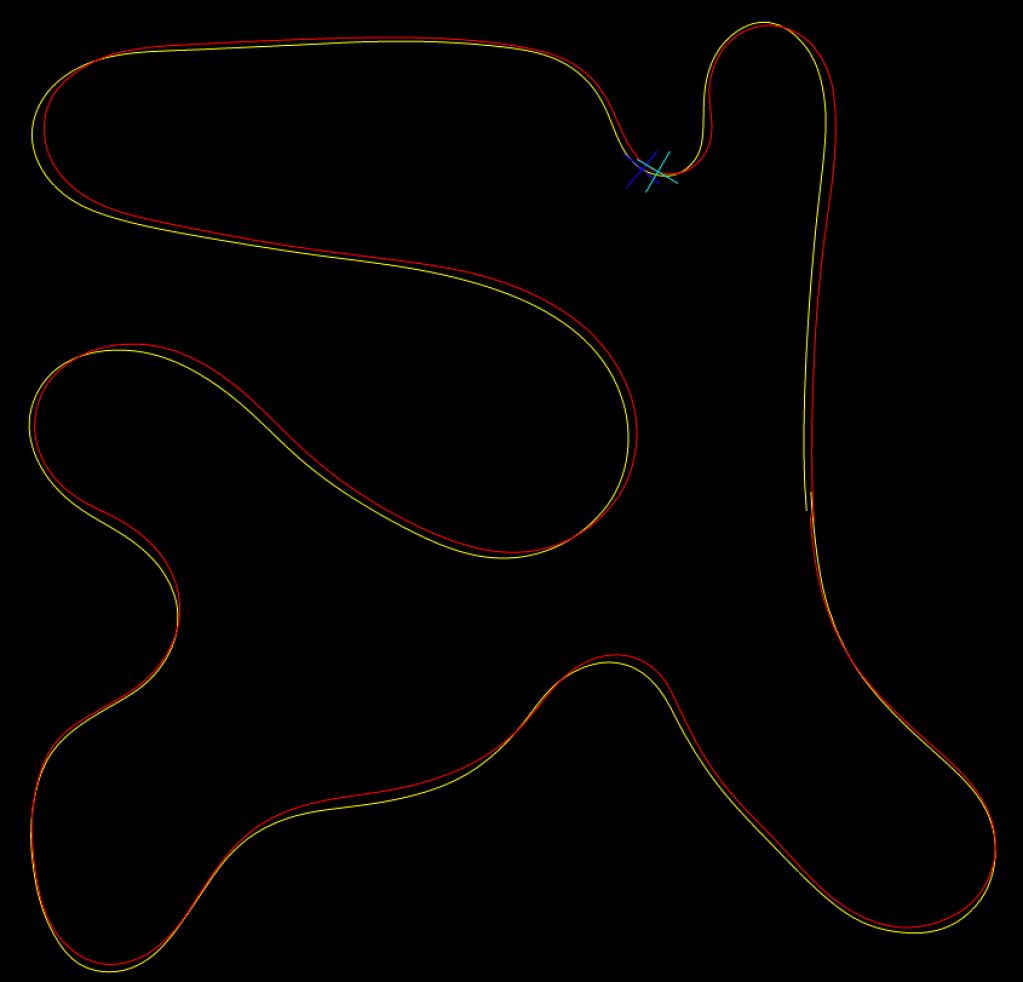
In the GPS trace you can see I drive a slightly different line in his car. Some of that is me being inconsistent, the other part is I drive a powerful car differently, and I’m sure you would, too.
Conclusions?
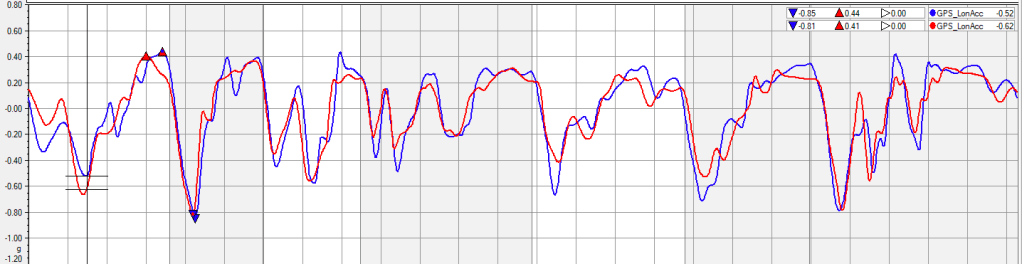
Driving Stefan’s car back-to-back with my own, the K24 felt amazing: flat torque, instant push, and then a top-end rush. What’s weird is that I’m not seeing that at all in the data! If I look at the longitudinal Gs, the K24 maxes out at .44g, and the B6 at .41g. I’d have expected more out of the K and less out of the B.
The VTEC hit comes really late, especially at this track, with this gearing. Right when you feel the VTEC kick in, you have to get on the brakes; it’s both annoying and a disappointment because you really want to ride that wave. And this may be partly why the min speeds are lower in T4, T12, and T13, because the VTEC caught both of us off balance and forced us deeper into the corner on the brakes. However, this doesn’t explain the difference in min speed in the esses.
Weight could be a factor here, especially in the fast transitions. While the cast-iron block of the B6ZE weighs more than the K24, the brackets and other associated hardware for the motor swap may have added some weight. Stefan’s car also has a soft top under the hardtop, but that should be about the same weight as my rollbar, which his car didn’t have. And my car has a tow hitch. In any case, the weights should be pretty close, and I’d guess there isn’t more than 50 lbs between them.
Both cars started out with 6” ring gears and have been upgraded with 7” Torsens. I believe both cars had the same 4:1 final drive ratio at the time. And both cars had manual racks and no ABS. Even Steven, all the way around.
What about lateral grip then? Rivals are supposed to be stickier than RS4s, but the data shows them having slightly less lateral grip. In left turns, the Rivals were about the same or better, but in right turns (which there are more of), the RS4s had more grip. RS4s FTW! (I’m punching the air as I write this.)
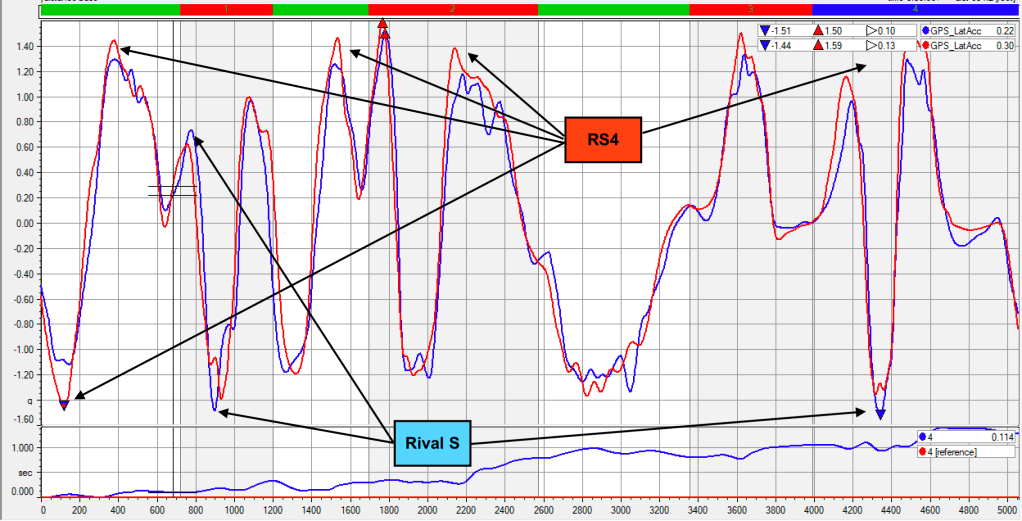
This left/right imbalance could be because of sub-optimal alignment on Stefan’s car. I didn’t use a pyrometer on that day (I wasn’t officially car testing, I was just a helping hand), so I don’t know if the alignment or tire pressures were correct. And then perhaps his suspension was set up poorly, and mine was better. But seriously, I have to think that Bilsteins on their worst setting are better than Teins on their best.
Personally, I have a lot of time driving RS4s, and I can drive them at the limit easily. I had a harder time with the Rivals. Factor that into my lap times.
And for sure some of this mystery is the track itself. Pineview Run is like an autocross, but with massive elevation and camber changes. Top speed is around 70 mph in a Miata, and average corner speed is in the low 40s.
At any other track, the K24 would have had a chance to stretch its legs and run away. However, Pineview Run continues to be a riddle, wrapped in a mystery, inside an enigma. High-powered cars are hamstrung here, front-wheel drive cars are hobbled at the knees, and aero doesn’t have a leg to stand on. To that point, both cars had R-package front lips and rear spoilers. My spoiler was an inch taller, but otherwise the cars had identical aero at that time.
If I had to guess what’s going on, it has to do with drivability. There are so many low-speed corners connected to each other that throttle modulation becomes perhaps the most important factor. This is not simply for accelerating out of the corner, but for balancing the chassis for optimal grip. I saw this when driving other cars that had abrupt power deliveries, and they were always slower than expected, sometimes much slower. Which is not to say that the K24 had an abrupt delivery at all, but it didn’t have that partial throttle crispness and exactness that my NA6 has. And it’s hard to get out of shape when you have no torque!
Dylan’s NB2-swapped NA was there on the same day, and it was even better in this regard. But his car was shod with Yokohama S-Drives, and so no direct comparison can be made there. I’ve said this before and I’ll say it again: this was the best normally aspirated Miata engine I’ve ever driven. Stefan can assemble the same spec engine for you at a reasonable price, and if I wasn’t so far down the path of 1.6 absurdity, I’d have him build me one.
Well that was in the before time, and in the present day both of the Napp Motorsports cars are ruined have turbos. My car has evolved slightly with a unicorn 4.625:1 final drive and better aero. Both cars are diverging from each other, but perhaps one day we can do another test at Pineview using the same tires, and shed some more light on this subject. Or the 1.6 will win again and extinguish the lights completely.

